
合作咨询热线:
155-8888-6921
合作咨询热线:
155-8888-6921

电荷泵锁相回路(Charge-pump phase-locked loop)简称CP-PLL,是一种鉴相器适用于方波输入信号的锁相回路。CP-PLL可以快速的锁定到输入信号的相位,可以达到很低的稳态相位误差。
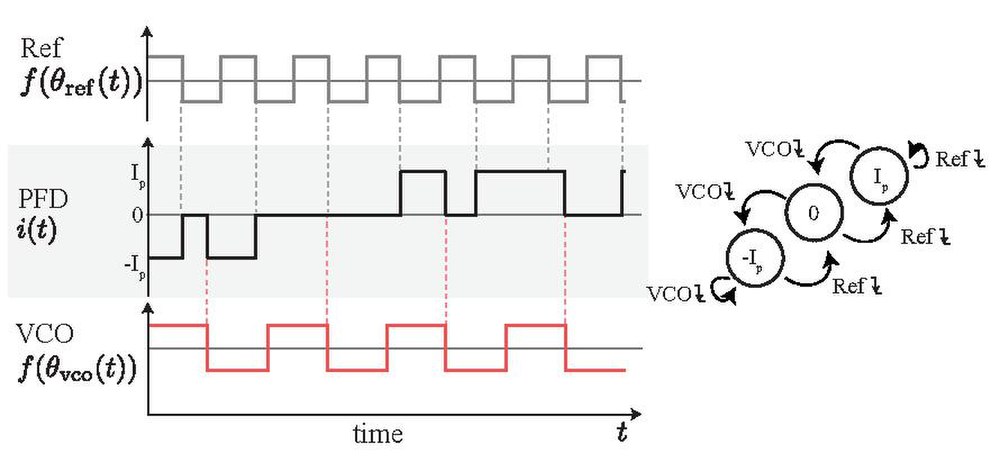
鉴相器(PFD)是由参考信号(Ref)以及受控输出(VCO)信号的下缘所触发。PFD{\displaystyle i(t)}i(t)的输出信号只有三个状态:0,{\displaystyle+I_{p}}{\displaystyle+I_{p}},和{\displaystyle-I_{p}}{\displaystyle-I_{p}}。参考信号的下缘会使PFD切换到较高的状态,若PFD已经在{\displaystyle+I_{p}}{\displaystyle+I_{p}}就不会变动。VCO信号的下缘会使PFD切换到较低的状态,若PFD已经在{\displaystyle-I_{p}}{\displaystyle-I_{p}}就不会变动。若二个信号的下缘同时出现,PFD会切换到0。
第一个二阶CP-PLL的数学模型是由佛洛依德·加德纳在1980年提出的。M.van Paemel在1994年提出了不考虑VCO过载(overload)的非线性模型[3],N.Kuznetsov等人在2019年优化该模型。也有学者在推导考虑VCO过载的CP-PLL解析解数学模型。
CP-PLL的数学模型可以针对一些参数进行解析的预估,例如hold-in范围(在VCO没有过载的情形下,可能进行锁相的输入信号频率范围),及捕获范围(pull-in range,在CP-PLL任意初始状态下,CP-PLL最终可以锁相的输入信号频率范围)。
二阶CP-PLL的连续时间线性模型以及加德纳的猜想
加德纳的分析是以以下的近似为基础:每个参考信号的周期内,PFD非零的时间区间为
{\displaystyle t_{p}=|\theta _{e}|/\omega _{\rm{ref}},\\theta _{e}=\theta _{\rm{ref}}-\theta _{\rm{vco}}.}{\displaystyle t_{p}=|\theta _{e}|/\omega _{\rm{ref}},\\theta _{e}=\theta _{\rm{ref}}-\theta _{\rm{vco}}.}
CP-PLL的PDF平均输出为
{\displaystyle i_{d}=I_{p}\theta _{e}/2\pi}{\displaystyle i_{d}=I_{p}\theta _{e}/2\pi}
对应的传递函数为
{\displaystyle I_{d}(s)=I_{p}\theta _{e}(s)/2\pi}{\displaystyle I_{d}(s)=I_{p}\theta _{e}(s)/2\pi}
若用滤波器传递函数{\displaystyle F(s)=R+{\frac{1}{Cs}}}{\displaystyle F(s)=R+{\frac{1}{Cs}}}以及VCO传递函数{\displaystyle\theta _{\rm{vco}}(s)=K_{\rm{vco}}I_{d}(s)F(s)/s}{\displaystyle\theta _{\rm{vco}}(s)=K_{\rm{vco}}I_{d}(s)F(s)/s},可以得到加德纳的二阶CP-PLL线性近似平均模型:
{\displaystyle{\frac{\theta _{e}(s)}{\theta _{\rm{ref}}(s)}}={\frac{2\pi s}{2\pi s+K_{\rm{vco}}I_{p}\left(R+{\frac{1}{Cs}}\right)}}.}{\displaystyle{\frac{\theta _{e}(s)}{\theta _{\rm{ref}}(s)}}={\frac{2\pi s}{2\pi s+K_{\rm{vco}}I_{p}\left(R+{\frac{1}{Cs}}\right)}}.}
佛洛依德·加德纳在1980年以上述的理解,提出了猜想:“实际电荷泵锁相回路的暂态响应,预期会和等效传统PLL的暂态响应几乎相同。”:1856(加德纳对CP-PLL的猜想)。依照加德纳的结果,也类似Egan在type 2 APLL捕获范围的猜想,Amr M.Fahim在其书中猜想[7]:6:为了要达到无限大的捕获范围,CP-PLL的回路滤波器需要使用主动滤波器(Fahim-Egan在type II CP-PLL捕获范围的猜想)。
二阶CP-PLL的连续时间非线性模型
为了简化推导,但不失去通用性,假设VCO和参考信号在其相位为整数时为其下降缘。令参考信号第一个下降缘的时间为{\displaystyle t=0}t=0。PFD状态{\displaystyle i(0)}{\displaystyle i(0)}会依PFD的初始状态{\displaystyle i(0-)}{\displaystyle i(0-)},VCO的初始相位移{\displaystyle\theta _{vco}(0)}{\displaystyle\theta _{vco}(0)},以及参考信号{\displaystyle\theta _{ref}(0)}{\displaystyle\theta _{ref}(0)}的值而不同。
若利用电阻和电容制作纯PI(比例积分)的滤波器,其输入电流{\displaystyle i(t)}i(t)和输出电压{\displaystyle v_{F}(t)}{\displaystyle v_{F}(t)}的关系为
{\displaystyle{\begin{aligned}v_{F}(t)=v_{c}(0)+Ri(t)+{\frac{1}{C}}\int\limits _{0}^{t}i(\tau)d\tau\end{aligned}}}{\displaystyle{\begin{aligned}v_{F}(t)=v_{c}(0)+Ri(t)+{\frac{1}{C}}\int\limits _{0}^{t}i(\tau)d\tau\end{aligned}}}
其中{\displaystyle R>0}{\displaystyle R>0}是电阻,{\displaystyle C>0}{\displaystyle C>0}是电感。{\displaystyle v_{c}(t)}{\displaystyle v_{c}(t)}是电容器的电压。控制信号{\displaystyle v_{F}(t)}{\displaystyle v_{F}(t)}会调整VCO频率:
{\displaystyle{\begin{aligned}{\dot{\theta}}_{vco}(t)=\omega _{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}v_{F}(t),\end{aligned}}}{\displaystyle{\begin{aligned}{\dot{\theta}}_{vco}(t)=\omega _{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}v_{F}(t),\end{aligned}}}
其中{\displaystyle\omega _{vco}^{\text{free}}}{\displaystyle\omega _{vco}^{\text{free}}}是VCO的自由运行频率(也就是{\displaystyle v_{F}(t)\equiv 0}{\displaystyle v_{F}(t)\equiv 0}),{\displaystyle K_{vco}}{\displaystyle K_{vco}}是VCO增益(灵敏度)、{\displaystyle\theta _{vco}(t)}{\displaystyle\theta _{vco}(t)}是VCO相位。最后,CP-PLL连续时间非线性数学模型如下
{\displaystyle{\begin{aligned}{\dot{v}}_{c}(t)={\tfrac{1}{C}}i(t),\quad{\dot{\theta}}_{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}(Ri(t)+v_{c}(t))\end{aligned}}}{\displaystyle{\begin{aligned}{\dot{v}}_{c}(t)={\tfrac{1}{C}}i(t),\quad{\dot{\theta}}_{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}(Ri(t)+v_{c}(t))\end{aligned}}}
其中有以下的不连续分段常数非线性
{\displaystyle i(t)=i{\big(}i(t-),\theta _{ref}(t),\theta _{vco}(t){\big)}}{\displaystyle i(t)=i{\big(}i(t-),\theta _{ref}(t),\theta _{vco}(t){\big)}}
初始条件为{\displaystyle{\big(}v_{c}(0),\theta _{vco}(0){\big)}}{\displaystyle{\big(}v_{c}(0),\theta _{vco}(0){\big)}}.此模型是非线性、非自主式、不连续的开关系统。
二阶CP-PLL的离散时间非线性模型
假设参考信号频率为常数:{\displaystyle\theta _{ref}(t)=\omega _{ref}t={\frac{t}{T_{ref}}},}{\displaystyle\theta _{ref}(t)=\omega _{ref}t={\frac{t}{T_{ref}}},}其中{\displaystyle T_{ref}}{\displaystyle T_{ref}}、{\displaystyle\omega _{ref}}{\displaystyle\omega _{ref}}和{\displaystyle\theta _{ref}(t)}{\displaystyle\theta _{ref}(t)}是参考资料的周期、频率和相位。
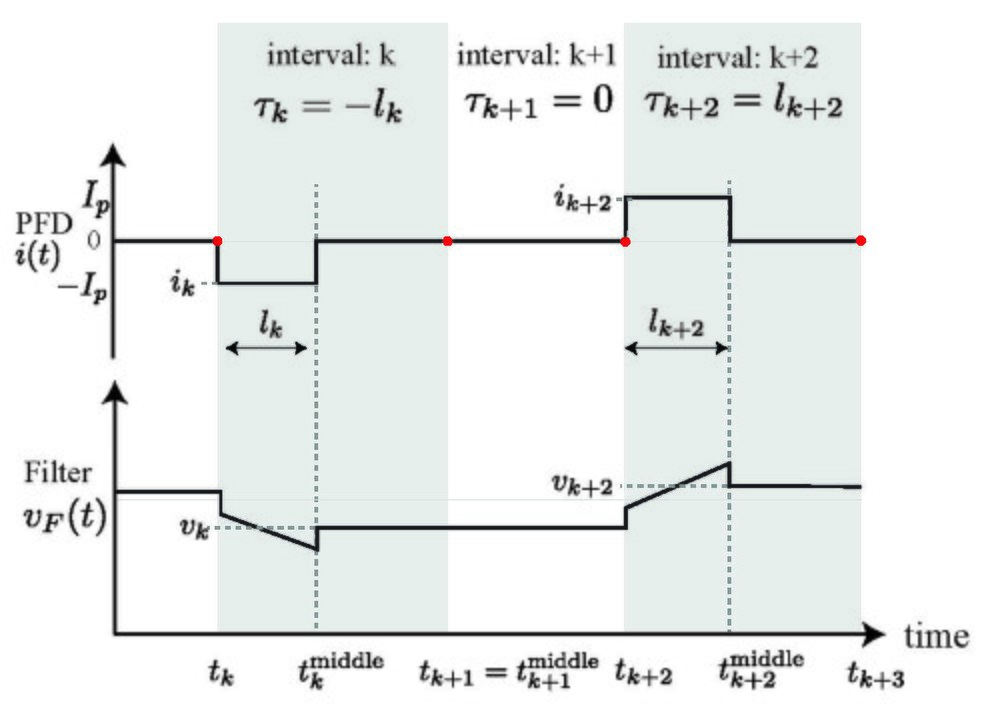
令{\displaystyle t_{0}=0}{\displaystyle t_{0}=0},这表示{\displaystyle t_{0}^{\rm{middle}}}{\displaystyle t_{0}^{\rm{middle}}}是第一个PFD输出为0的时间(若{\displaystyle i(0)=0}{\displaystyle i(0)=0},则{\displaystyle t_{0}^{\rm{middle}}=0}{\displaystyle t_{0}^{\rm{middle}}=0})且{\displaystyle t_{1}}t_{1}是VCO或参考信号的第一个下降缘。其且,可以定义对应的递减数列{\displaystyle\{t_{k}\}}{\displaystyle\{t_{k}\}}、{\displaystyle\{t_{k}^{\rm{middle}}\}}{\displaystyle\{t_{k}^{\rm{middle}}\}},其中{\displaystyle k=0,1,2...}{\displaystyle k=0,1,2...}。
令{\displaystyle t_{k}<t_{k}^{\rm{middle}}}{\displaystyle t_{k}<t_{k}^{\rm{middle}}}.则在{\displaystyle t\in[t_{k},t_{k}^{\rm{middle}})}{\displaystyle t\in[t_{k},t_{k}^{\rm{middle}})}时,{\displaystyle{\text{sign}}(i(t))}{\displaystyle{\text{sign}}(i(t))}是非零的常数({\displaystyle\pm 1}{\displaystyle\pm 1})。令{\displaystyle\tau _{k}}{\displaystyle\tau _{k}}为PFD脉波宽度(PFD输出为非零长度的时间区间)乘以PFD输出的正负号:
{\displaystyle\tau _{k}=(t_{k}^{\rm{middle}}-t_{k}){\text{sign}}(i(t))}{\displaystyle\tau _{k}=(t_{k}^{\rm{middle}}-t_{k}){\text{sign}}(i(t))}for{\displaystyle t\in[t_{k},t_{k}^{\rm{middle}})}{\displaystyle t\in[t_{k},t_{k}^{\rm{middle}})}
{\displaystyle\tau _{k}=0}{\displaystyle\tau _{k}=0}for{\displaystyle t_{k}=t_{k}^{\rm{middle}}}{\displaystyle t_{k}=t_{k}^{\rm{middle}}}
若VCO的下降缘在参考信号的下降缘之前,则{\displaystyle\tau _{k}<0}{\displaystyle\tau _{k}<0},反之,可得{\displaystyle\tau _{k}>0}{\displaystyle\tau _{k}>0}。{\displaystyle\tau _{k}}{\displaystyle\tau _{k}}可以看出二个信号下降缘的先后顺序。在{\displaystyle(t_{k}^{\rm{middle}},t_{k+1})}{\displaystyle(t_{k}^{\rm{middle}},t_{k+1})}区间内,PFD输出为零,PFD{\displaystyle i(t)\equiv 0}{\displaystyle i(t)\equiv 0}:
{\displaystyle v_{F}(t)\equiv v_{k}}{\displaystyle v_{F}(t)\equiv v_{k}}for{\displaystyle t\in[t_{k}^{\rm{middle}},t_{k+1})}{\displaystyle t\in[t_{k}^{\rm{middle}},t_{k+1})}.
将{\displaystyle(\tau _{k},v_{k})}{\displaystyle(\tau _{k},v_{k})}变成下式的变数变换[8]{\displaystyle p_{k}={\frac{\tau _{k}}{T_{\rm{ref}}}},u_{k}=T_{\rm{ref}}(\omega _{\rm{vco}}^{\text{free}}+K_{\rm{vco}}v_{k})-1,}{\displaystyle p_{k}={\frac{\tau _{k}}{T_{\rm{ref}}}},u_{k}=T_{\rm{ref}}(\omega _{\rm{vco}}^{\text{free}}+K_{\rm{vco}}v_{k})-1,}可以让参数减至二个:{\displaystyle\alpha=K_{\rm{vco}}I_{p}T_{\rm{ref}}R,\beta={\frac{K_{\rm{vco}}I_{p}T_{\rm{ref}}^{2}}{2C}}.}{\displaystyle\alpha=K_{\rm{vco}}I_{p}T_{\rm{ref}}R,\beta={\frac{K_{\rm{vco}}I_{p}T_{\rm{ref}}^{2}}{2C}}.}
此处{\displaystyle p_{k}}p_k是正规化的相位偏移,{\displaystyle u_{k}+1}{\displaystyle u_{k}+1}是VCO频率{\displaystyle\omega _{\rm{vco}}^{\text{free}}+K_{\rm{vco}}v_{k}}{\displaystyle\omega _{\rm{vco}}^{\text{free}}+K_{\rm{vco}}v_{k}}相对于参考频率{\displaystyle{\frac{1}{T_{\rm{ref}}}}}{\displaystyle{\frac{1}{T_{\rm{ref}}}}}的比例。
最后,不考虑VCO过载的二阶CP-PLL离散时间模型如下
{\displaystyle{\begin{aligned}&u_{k+1}=u_{k}+2\beta p_{k+1},\\&p_{k+1}={\begin{cases}{\frac{-(u_{k}+\alpha+1)+{\sqrt{(u_{k}+\alpha+1)^{2}-4\beta c_{k}}}}{2\beta}},\quad{\text{for}}p_{k}\geq 0,\quad c_{k}\leq 0,\\{\frac{1}{u_{k}+1}}-1+(p_{k}{\text{mod}}1),\quad{\text{for}}p_{k}\geq 0,\quad c_{k}>0,\\l_{k}-1,\quad{\text{for}}p_{k}<0,\quad l_{k}\leq 1,\\{\frac{-(u_{k}+\alpha+1)+{\sqrt{(u_{k}+\alpha+1)^{2}-4\beta d_{k}}}}{2\beta}},\quad{\text{for}}p_{k}<0,\quad l_{k}>1,\end{cases}}\end{aligned}}}{\displaystyle{\begin{aligned}&u_{k+1}=u_{k}+2\beta p_{k+1},\\&p_{k+1}={\begin{cases}{\frac{-(u_{k}+\alpha+1)+{\sqrt{(u_{k}+\alpha+1)^{2}-4\beta c_{k}}}}{2\beta}},\quad{\text{for}}p_{k}\geq 0,\quad c_{k}\leq 0,\\{\frac{1}{u_{k}+1}}-1+(p_{k}{\text{mod}}1),\quad{\text{for}}p_{k}\geq 0,\quad c_{k}>0,\\l_{k}-1,\quad{\text{for}}p_{k}<0,\quad l_{k}\leq 1,\\{\frac{-(u_{k}+\alpha+1)+{\sqrt{(u_{k}+\alpha+1)^{2}-4\beta d_{k}}}}{2\beta}},\quad{\text{for}}p_{k}<0,\quad l_{k}>1,\end{cases}}\end{aligned}}}
其中
{\displaystyle{\begin{aligned}c_{k}=(1-(p_{k}{\text{mod}}1))(u_{k}+1)-1,S_{l_{k}}=-(u_{k}-\alpha+1)p_{k}+\beta p_{k}^{2},l_{k}={\frac{1-(S_{l_{k}}{\text{mod}}1)}{u_{k}+1}},d_{k}=(S_{l_{k}}{\text{mod}}1)+u_{k}.\end{aligned}}}{\displaystyle{\begin{aligned}c_{k}=(1-(p_{k}{\text{mod}}1))(u_{k}+1)-1,S_{l_{k}}=-(u_{k}-\alpha+1)p_{k}+\beta p_{k}^{2},l_{k}={\frac{1-(S_{l_{k}}{\text{mod}}1)}{u_{k}+1}},d_{k}=(S_{l_{k}}{\text{mod}}1)+u_{k}.\end{aligned}}}
此离散时间模型只在{\displaystyle(u_{k}=0,p_{k}=0)}{\displaystyle(u_{k}=0,p_{k}=0)}有一个稳态,可以估计hold-in范围和捕获范围。
若VCO过载,也就是{\displaystyle{\dot{\theta}}_{\rm{vco}}(t)}{\displaystyle{\dot{\theta}}_{\rm{vco}}(t)}为零,或者是以下的式子{\displaystyle(p_{k}>0,u_{k}<2\beta p_{k}-1)}{\displaystyle(p_{k}>0,u_{k}<2\beta p_{k}-1)}或{\displaystyle(p_{k}<0,u_{k}<\alpha-1)}{\displaystyle(p_{k}<0,u_{k}<\alpha-1)},则需要考虑额外的CP-PLL动态特性[5]。针对任何参数,只要VCO和参考信号的频率差够大,就会使VCO过载。在实务上,需避免VCO的过载。
高阶CP-PLL非线性模型推导和超越方程有关,无法求得解析解,需要用近似的方式计算

